

- Přehledy IS
- APS (20)
- BPM - procesní řízení (22)
- Cloud computing (IaaS) (10)
- Cloud computing (SaaS) (33)
- CRM (51)
- DMS/ECM - správa dokumentů (20)
- EAM (17)
- Ekonomické systémy (68)
- ERP (77)
- HRM (27)
- ITSM (6)
- MES (32)
- Řízení výroby (37)
- WMS (31)
- Dodavatelé IT služeb a řešení
- Datová centra (25)
- Dodavatelé CAD/CAM/PLM/BIM... (39)
- Dodavatelé CRM (33)
- Dodavatelé DW-BI (50)
- Dodavatelé ERP (71)
- Informační bezpečnost (50)
- IT řešení pro logistiku (45)
- IT řešení pro stavebnictví (25)
- Řešení pro veřejný a státní sektor (27)
Tematické sekce
 ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tisk
ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tiskBranžové sekce
| Přihlaste se k odběru newsletteru SystemNEWS, který každý týden přináší výběr článků z oblasti podnikové informatiky | |
 | |


Partneři webu

CAD I , Plánování a řízení výroby , CAD/CAM/CAE/PLM/3D tisk




Explicitní řešič pro strukturální analýzy?
Vojtěch Rulc
 Mechanika je klíčovou oblastí při řešení mnoha různých technických problémů, ať už se jedná o vývoj nových produktů, optimalizaci existujících systémů, nebo simulujeme chování při extrémních podmínkách. Pro řešení těchto problémů se nejběžněji používají implicitní řešiče, které jsou v lineární podobě často součástí i běžných CAD systémů. Tyto řešiče pracují na principu implicitního numerického řešení diferenciálních rovnic a jsou vynikající především pro řešení statických úloh. Vhodné jsou i pro řešení nelineárního chování kontaktů nebo materiálů.
Mechanika je klíčovou oblastí při řešení mnoha různých technických problémů, ať už se jedná o vývoj nových produktů, optimalizaci existujících systémů, nebo simulujeme chování při extrémních podmínkách. Pro řešení těchto problémů se nejběžněji používají implicitní řešiče, které jsou v lineární podobě často součástí i běžných CAD systémů. Tyto řešiče pracují na principu implicitního numerického řešení diferenciálních rovnic a jsou vynikající především pro řešení statických úloh. Vhodné jsou i pro řešení nelineárního chování kontaktů nebo materiálů.
Avšak implicitní řešiče mohou být někdy problematické kvůli své složitosti a náročnosti na výpočetní zdroje. Tyto řešiče vyžadují, především pro nelineární problémy, pečlivé nastavení vstupních parametrů a mohou mít tendenci při výpočtu nekonvergovat.
Na druhé straně, explicitní řešiče mechaniky fungují na principu explicitního numerického řešení diferenciálních rovnic v nichž se vyskytuje i časová složka a poskytují jednodušší a robustnější řešení. Tyto řešiče umožňují řešit problémy s vysokou rychlostí a přesností, aniž by bylo nutné nastavovat složité parametry výpočtu. Navíc jsou explicitní řešiče vhodné pro řešení problémů s rychlými změnami stavu, jako jsou například kolize a deformace.
Implicitní a explicitní řešiče mechaniky poskytují každý jiné výhody a nevýhody a hodí se k řešení jiných mechanických úloh. Proto je důležité před simulací zvážit použití obou typů řešičů, aby bylo možné dosáhnout co nejlepšího výsledku. Úvaha by měla brát v potaz specifické potřeby daného projektu a volba by měla být založena na kombinaci rychlosti, přesnosti a schopnosti řešit složité úlohy. Je důležité si uvědomit, že implicitní a explicitní řešiče nejsou vzájemně se vylučující, a mohou být k dosažení nejlepších výsledků použity i společně.
Výběr správného typu analýzy je někdy proveden nesprávně z důvodu nedostatečných znalostí o zkoumaném problému. Často se zvolí jednodušší řešení řešitele a zanedbá se složitost situace. Například se chybně zvolí lineární analýza, když problém vyžaduje úvahy o plasticitě.
Jaký řešič tedy kdy volit?
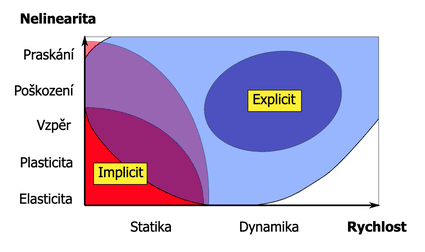
Nejprve je potřeba si uvědomit, zda je úloha časově závislá, či nezávislá. Pokud je vliv zrychlení v úloze významný a nelze jej zanedbat, označujeme problémy jako časově závislé. Například při pádové zkoušce, kdy se předmět zpomaluje až nadoraz, se největší síla projeví během prvních několika milisekund. V tomto případě je nutné zohlednit vliv takového zpomalení. Naproti tomu lze zatížení považovat za kvazistatické nebo časově nezávislé, pokud na konstrukci působí zatížení pomalu. Je-li rychlost zatěžování dostatečně pomalá, lze účinky zrychlení zanedbat.

Implicitní řešení je užitečné v problémech, kde časová závislost řešení není důležitým faktorem (jako je statická nebo modální analýza apod.), zatímco explicitní řešení je nejužitečnější při řešení problémů s vysokou závislostí deformace na čase (nárazy, pády, rázy a další).
Analýza explicitní dynamiky se používá ke stanovení dynamické odezvy konstrukce v důsledku šíření napěťové vlny, nárazu nebo rychle se měnícího časově závislého zatížení. Setrvačné účinky a předání hybnosti mezi pohybujícími se tělesy jsou obvykle důležitými aspekty tohoto typu analýzy. Lze ji použít také k modelování mechanických jevů, které jsou vysoce nelineární. Nelinearity mohou vycházet z materiálů, z kontaktů a z geometrické deformace.
Podíváme-li se na nelinearity detailněji, můžeme uvést jednotlivé příklady. Za nelineární chování materiálů považujeme hyperelasticitu, plastické toky a především poruchy. Chceme-li simulovat lámání, praskání materiálu a následné šíření trhlin, bez explicitního řešení se neobejdeme. V oblasti kontaktů je explicit nástrojem pro řešení vysokorychlostních srážek a nárazů. A nakonec představiteli geometrické nelinearity mohou být vzpěr nebo zborcení. Především u zborcení si s implicitním řešičem nevystačíme.
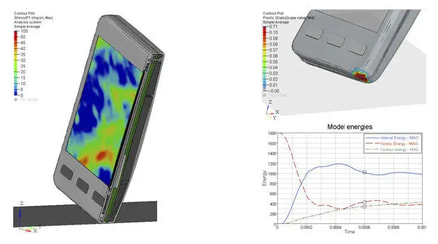
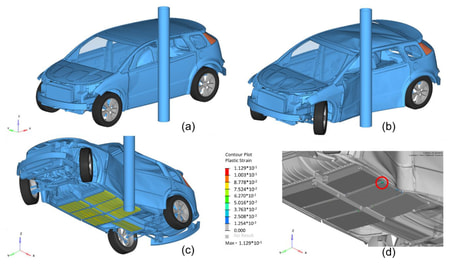
Typickými příklady explicitní analýzy v praxi jsou simulace nárazových zkoušek automobilů, simulace srážky letadla s ptákem, vyřazení lopatek proudového motoru, ale i běžnější úlohy jakými je třeba pádová zkouška využívaná u vývoje, elektroniky, dílenského nářadí nebo obalů.
V automobilovém průmyslu nalezne explicitní řešič využití nejen u zmiňovaných crash-testů, ale i při vývoji plastových upevňovacích prvků (zácvaků), nebo dílčích prvků pasivní bezpečnosti (předepínače pásů, airbagy, zámky), u zkoušek mechanické odolnosti nabíjecích konektorů nebo baterií v elektromobilitě.
Z oblasti obranného průmyslu jmenujme simulace explozí nebo odolnosti proti střelám.
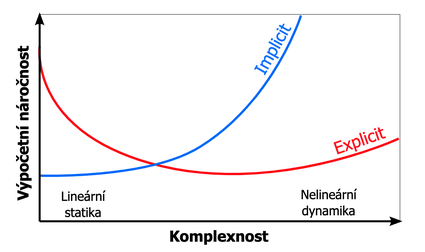
V systému Altair Radioss jsou k dispozici jak implicitní, tak explicitní schémata časové integrace. V explicitním schématu se rychlosti a posuny získávají přímou integrací uzlových zrychlení. Při tomto přístupu je časový krok cyklu často malý z důvodu stability. Proto je u statických nebo pomalých dynamických výpočtů, kde je doba trvání studie dlouhá, nutné k provedení simulace provést mnoho cyklů. Alternativou k explicitní metodě je v takových případech implicitní schéma časové integrace. Lze ukázat, že implicitní schéma je bezpodmínečně stabilní, což vede k většímu časovému kroku cyklu ve srovnání s explicitní metodou. V implicitním schématu je však třeba sestavit a invertovat globální matici tuhosti, což vede k vyšším paměťovým nárokům na jeden zatěžovací krok. Ačkoli je implicitní schéma bezpodmínečně stabilní, není bezpodmínečně konvergovatelné (nelineární případ). Ve skutečnosti je obecně méně robustní než explicitní schéma a vyžaduje větší zapojení uživatele. Rovnováha je vynucována parametry tolerancí stanovených uživatelem. Implicitní analýza si lépe poradí s problémy, jakými jsou cyklické zatížení, průraz a zpětný ráz.
Explicitní přístup je vhodnější pro rychlé dynamické problémy s vysoce nelineárním geometrickým a materiálovým chováním. Protože se všemi veličinami lze zacházet jako s vektory, je zapotřebí málo paměti. Explicitní dynamické řešiče poskytují alternativní přístup k řešení vysoce nelineárních statických analýz, které nekonvergují nebo konvergují s implicitním řešitelem velmi pomalu. Modely, které zahrnují složité kontakty s výrazným posuvem a vysoce nelineárním chováním materiálu a deformací prvků, lze zvládnout pomocí explicitních řešičů. Zatímco implicitní řešiče jsou pro statické problémy stále první volbou, explicitní řešiče s vhodným nastavením přechodového času a tlumení lze použít k zajištění robustních řešení obzvláště problematických statických problémů.
Zvažte tedy, zda si při simulacích i nadále vystačíte s běžným implicitním řešičem, nebo je načase implementovat do vývojového procesu i simulace založené na explicitním řešení.
Ing. Vojtěch Rulc, Ph.D.
Autor článku je Project Engineer ve společnosti Advanced Engineering s.r.o.
Autor článku je Project Engineer ve společnosti Advanced Engineering s.r.o.
Chcete získat časopis IT Systems s tímto a mnoha dalšími články z oblasti informačních systémů a řízení podnikové informatiky? Objednejte si předplatné nebo konkrétní vydání časopisu IT Systems z našeho archivu.










| Po | Út | St | Čt | Pá | So | Ne |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 1 | 2 | 3 | 4 | 5 |
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
IT Systems podporuje
| 6.10. | Unicorn Banking Forum 2016 |
Formulář pro přidání akce
Další vybrané akce
| 26.6. | Certifikace ISO prakticky |
| 30.9. | Konference Světlo |