

- Přehledy IS
- APS (20)
- BPM - procesní řízení (22)
- Cloud computing (IaaS) (10)
- Cloud computing (SaaS) (33)
- CRM (51)
- DMS/ECM - správa dokumentů (20)
- EAM (17)
- Ekonomické systémy (68)
- ERP (77)
- HRM (27)
- ITSM (6)
- MES (32)
- Řízení výroby (37)
- WMS (31)
- Dodavatelé IT služeb a řešení
- Datová centra (25)
- Dodavatelé CAD/CAM/PLM/BIM... (39)
- Dodavatelé CRM (33)
- Dodavatelé DW-BI (50)
- Dodavatelé ERP (71)
- Informační bezpečnost (50)
- IT řešení pro logistiku (45)
- IT řešení pro stavebnictví (25)
- Řešení pro veřejný a státní sektor (27)
Tematické sekce
 ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tisk
ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tiskBranžové sekce
| Přihlaste se k odběru newsletteru SystemNEWS, který každý týden přináší výběr článků z oblasti podnikové informatiky | |
 | |


Partneři webu

IT SYSTEMS 9/2004
Řešení pro plánování a optimalizaci distribučních tras
RNDr. Zdeněk Moravec
Kvalitní naplánování distribučních tras, přesné a včasné informace o pohybu vozidel, možnost vyhodnocení a průběžné kontroly skutečných přepravních nákladů - to vše jsou nezbytné předpoklady pro efektivní organizaci dopravy a rozvozu zboží. Pro zvýšení efektivity plánování využívá stále více spedičních a distribučních společností podpory softwarových řešení. Jaké požadavky bychom ale měli na tato softwarová řešení klást?


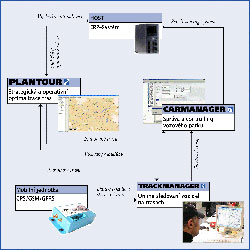
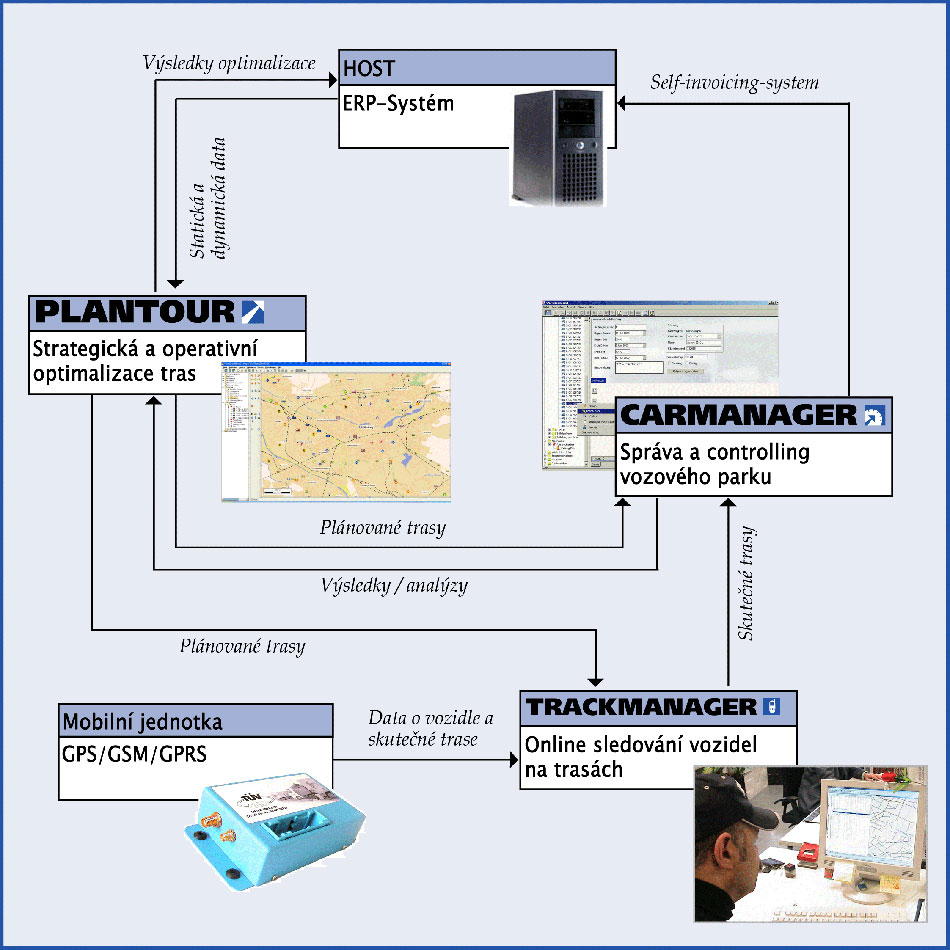
Obr. 1: Schéma komplexního řešení pro plánování, optimalizaci dopravy a sledování vozidel včetně napojení na ERP systém
Při své každodenní práci prochází dispečer poměrně náročným procesem, kdy na základě množiny objednávek na daný den musí dosáhnout optimálního plánu distribučních tras z hlediska časového i kilometrového. Navíc musí respektovat celou řadu omezení, která jsou na plán tras kladena - závozy odběratelů v přesně určených časových oknech, přiřazení určitého typu vozidla určité skupině zákazníků, omezení vjezdu vozidel nad 3,5 tuny do centra města apod. V neposlední řadě je nutné, aby vozidla na plánované trasy byla optimálně vytížená - hmotnostně, objemově, případně na základě jiného kritéria. Čím vyšší je počet každodenně plánovaných dodávek a čím je struktura omezení komplikovanější, tím horších výsledků dispečer manuálním sestavováním plánů bez pomoci softwarových systémů obvykle dosahuje. Není přitom důležité, zda distribuční nebo spediční firma používá vlastní nebo externí dopravu, v obou případech je situace stejná, v případě externí dopravy však o něco hůře kontrolovatelná.
Kde vzít data?
Vstupními daty pro sestavení plánu tras jsou objednávky aktivní pro zvolené období, informace o odběratelích, vozidlech, řidičích a restrikcích omezujících dodávku zboží na určené adresní místo. Tyto údaje jsou většinou dispečerovi k dispozici ve formě dat v rámci firemního ERP systému. Převedení těchto dat probíhá do optimalizačního systému automaticky pomocí příslušného interface. Tím odpadá nutnost manuálního zadávání dat, což nezřídka přináší další nepřesnosti, např. při překlepech. Při tvorbě distribučních tras je také důležité vědět, jaké jsou celkové délky těchto navržených tras (a to nejen kilometrové, ale i časové - dle typu využité silnice). V případě ručního plánování (popř. při užívání jednoduššího plánovacího systému) je možné tyto vzdálenosti pouze odhadovat na základě tabulky vzdáleností jednotlivých měst, při použití sofistikovanějších plánovacích systémů je možné vypočíst téměř stoprocentně přesné údaje na základě podrobných digitálních vektorových map, ve kterých jsou zohledněny parametry průjezdnosti silniční sítě, např. rychlostní faktory jednotlivých typů komunikací, trvalá i krátkodobá omezení provozu, kterými jsou např. jednosměrky, zpomalení silničního úseku z důvodu stavby na silnici, zvýšené hustoty provozu aj. Čím přesnější je předběžné určení délky trasy, tím lépe je možné určit celkové parametry plánovaných tras (km, délku trvání, celkové náklady) a tím lépe je také samozřejmě možné tyto údaje optimalizovat.
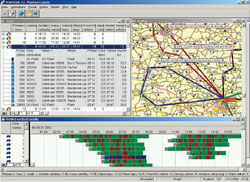
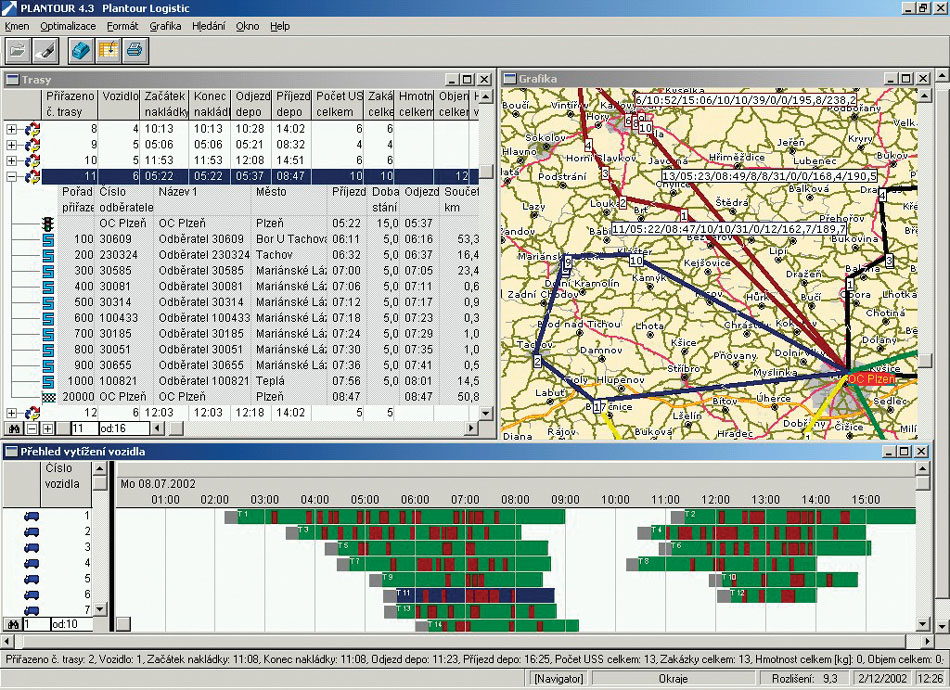
Obr. 2: Optimalizované trasy, přehled vytíženosti vozidel
Metoda první - pevné (kmenové) trasy
Nejjednodušším (a v případě ručního plánování také nejčastěji používaným) modelem pro tvorbu distribučních tras je příprava pevných, tzv. kmenových tras, do kterých se rozmístí všichni odběratelé. V případě, že na určitý den má odběratel objednávku, bude tato objednávka do trasy automaticky zařazena. Tento přístup je tím účinnější, čím pravidelnější (z hlediska frekvence i velikosti) jsou objednávky pro všechny odběratele. V případě, že se struktura objednávek často mění, vede tento model k nevytíženým vozidlům, případně k dosti náročné dodatečné práci dispečera na finální úpravě tras. Řada plánovacích systémů nejde dále než k této variantě. Pevné trasy je možné jednu po druhé optimalizovat a dosáhnout tak určitých úspor na rozvoz. Úspory při použití tohoto typu plánovacího systému je možné očekávat zhruba v rozsahu 2-3 %.
Metoda druhá - volná optimalizace
Podstatou tzv.volné optimalizace je důraz na maximální úspory. V tomto případě plánovací systém hledá pro každý den optimální (z hlediska nákladů) distribuční trasy, které tedy mají každý den zcela jinou strukturu a zastávky. Z množiny vstupních objednávek se tedy pomocí příslušných algoritmů vytvoří množina distribučních tras - distribuční plán. Uživatel - plánovací dispečer - volí před spuštěním optimalizačního cyklu prioritu kritérií optimalizace, např. celkové náklady (nejčastěji používané), počet nasazených vozidel, počet tras, počet km apod. Vstupní data jsou propočtena integrovaným optimalizačním algoritmem. Volba algoritmu závisí na modelu přepravy spediční nebo distribuční společnosti. Pro firmy zabývající se kurýrními službami nebo převozem cenin je například často používán modifikovaný algoritmus pickup and delivery - který umožňuje plánovat vyzvednutí zakázky na jiném místě než v centrálním depu, u distribučních firem je nejčastěji využíván heuristický algoritmus (např. savings) - pro distribuci z jednoho nebo více centrálních dep. Algoritmy heuristického typu jsou velmi sofistikované a náročné na úspěšné vyladění - z toho plyne i poměrně malé množství programů, které volnou optimalizaci nabízejí. Metoda volné optimalizace přináší obvykle úspory v dopravních nákladech v rozmezí 10-20 %, samozřejmě v závislosti na počtu objednávek a složitosti struktury omezení (čím více objednávek a čím složitější omezení, tím je očekávaná úspora vyšší). Na druhé straně je nutné zvážit také fakt, že trasy jsou každý den zcela jiné, což klade zvýšené nároky na znalosti a orientaci řidičů.
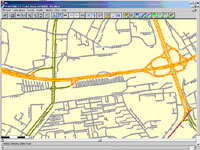
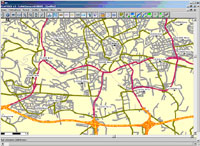
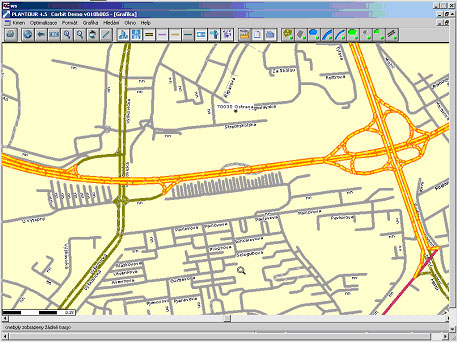
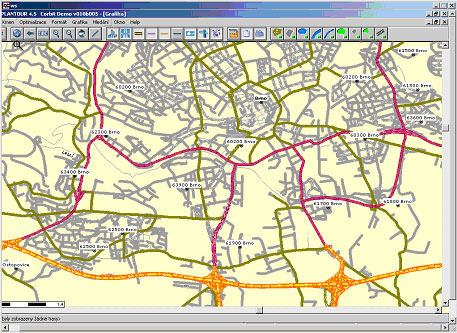
Obr. 3.: Ukázky vektorových map v systému Plantour
Třešnička na dortu - sledování vozidel
Kvalitní plánování je základem organizace efektivního rozvozu, je však pouze začátkem komplexního procesu organizace dopravy. Pro nákladově optimální organizaci vozového parku, která je předpokladem pro rychlou návratnost investic vložených do dopravy, jsou důležité rovněž přesné a včasné informace, možnost vyhodnocení skutečných nákladů na rozvoz a příčin případných odchylek mezi nákladově optimálním plánem a skutečností. Je nutné si však uvědomit, že základem je tvorba optimálních distribučních tras - prvotní není totiž kontrola, ale řízení. Teprve to, jak se dodržují pravidla naplánovaná s výhledem na optimální dopravní náklady, je dobrý základ pro sledování a kontrolu. Mnoho firem zde chybně postupuje přesně naopak. Sledovací systém se skládá z mobilních jednotek a ze softwarového vybavení, které je instalováno na počítači dispečerského (klientského) pracoviště. Informace pro vytvoření skutečných tras získává sledovací systém z mobilní jednotky prostřednictvím rozhraní, které je pro různé systémy univerzální a nezávislé na typu jednotek. Při výjezdu vozidla z depa dostává sledovací systém informaci o startu trasy. Impulsem pro zahájení sledování je například zapnutí zapalování ve sledovaném vozidle. Mobilní jednotka zasílá pomocí GSM modulu do centrály sledovacího systému informace o vozidle na trase, kterými jsou poloha, čas a stav externích senzorů. Informace o vozidle je ve sledovacím systému možno vyhodnocovat v průběhu trasy, nebo po jejím skončení. Poloha vozidla na trase je zaznamenávána a předávána systému v pravidelných časových intervalech. Díky v současné době již poměrně vyzrálé technologii permanentního připojení k internetu, GPRS, je možné využít stálé připojení mobilní jednotky k centrále sledovacího systému. Výhodou datových služeb GPRS jsou nízké komunikační náklady spojené se sledováním vozidla, zejména pak ve srovnání s výhradní komunikací prostřednictvím SMS. Skutečná trasa přenesená do sledovacího systému může tak obsahovat nejen informace o přesném průběhu trasy, ale rovněž informace vztahující se k zastávkám u odběratelů na trase. Ve skutečné trase jsou jednotlivým bodům trasy přiřazeny informace o čase, najetých kilometrech a rychlosti.
Co by měl dobrý plánovací a optimalizační systém umět
Na základě předchozích odstavců je možné formulovat požadavky na funkcionalitu plánovacího systému. Bez ohledu na pořadí důležitosti, které se liší v závislosti na typu přepravy, se jedná o možnost výběru volné optimalizace i kmenových tras, přesné vektorové mapy s možností integrace odběrného místa každého zákazníka do těchto map, možnost uživatelsky jednoduché závěrečné ruční korekce naplánovaných tras optimalizačním algoritmem, interface na firemní ERP systém, přehledné zobrazení (ideálně i možnost úpravy např. pomocí funkce drag and drop) naplánovaných tras přímo v mapovém okně, vazba na univerzální sledovací systém s možností využít pro plánované i skutečné trasy zobrazení ve stejném mapovém okně, možnost nastavení co nejširší škály omezení pro trasy (jedná se např. o časová okna, omezení typu vozidel apod.). Vzhledem ke složitosti heuristických optimalizačních algoritmů je také nutné, aby měl daný systém přesvědčivé reference v podobě firem, které jej úspěšně používají.
Autor článku, RNDr. Zdeněk Moravec, působí jako chief software architect ve firmě Digitech ČR, která zajišťuje distribuci produktů firmy CorbitConnect AG v České republice, na Slovensku a v Polsku a spolupodílí se na vývoji plánovacích a optimalizačních řešení.
Obr. 1: Schéma komplexního řešení pro plánování, optimalizaci dopravy a sledování vozidel včetně napojení na ERP systém
Při své každodenní práci prochází dispečer poměrně náročným procesem, kdy na základě množiny objednávek na daný den musí dosáhnout optimálního plánu distribučních tras z hlediska časového i kilometrového. Navíc musí respektovat celou řadu omezení, která jsou na plán tras kladena - závozy odběratelů v přesně určených časových oknech, přiřazení určitého typu vozidla určité skupině zákazníků, omezení vjezdu vozidel nad 3,5 tuny do centra města apod. V neposlední řadě je nutné, aby vozidla na plánované trasy byla optimálně vytížená - hmotnostně, objemově, případně na základě jiného kritéria. Čím vyšší je počet každodenně plánovaných dodávek a čím je struktura omezení komplikovanější, tím horších výsledků dispečer manuálním sestavováním plánů bez pomoci softwarových systémů obvykle dosahuje. Není přitom důležité, zda distribuční nebo spediční firma používá vlastní nebo externí dopravu, v obou případech je situace stejná, v případě externí dopravy však o něco hůře kontrolovatelná.
Kde vzít data?
Vstupními daty pro sestavení plánu tras jsou objednávky aktivní pro zvolené období, informace o odběratelích, vozidlech, řidičích a restrikcích omezujících dodávku zboží na určené adresní místo. Tyto údaje jsou většinou dispečerovi k dispozici ve formě dat v rámci firemního ERP systému. Převedení těchto dat probíhá do optimalizačního systému automaticky pomocí příslušného interface. Tím odpadá nutnost manuálního zadávání dat, což nezřídka přináší další nepřesnosti, např. při překlepech. Při tvorbě distribučních tras je také důležité vědět, jaké jsou celkové délky těchto navržených tras (a to nejen kilometrové, ale i časové - dle typu využité silnice). V případě ručního plánování (popř. při užívání jednoduššího plánovacího systému) je možné tyto vzdálenosti pouze odhadovat na základě tabulky vzdáleností jednotlivých měst, při použití sofistikovanějších plánovacích systémů je možné vypočíst téměř stoprocentně přesné údaje na základě podrobných digitálních vektorových map, ve kterých jsou zohledněny parametry průjezdnosti silniční sítě, např. rychlostní faktory jednotlivých typů komunikací, trvalá i krátkodobá omezení provozu, kterými jsou např. jednosměrky, zpomalení silničního úseku z důvodu stavby na silnici, zvýšené hustoty provozu aj. Čím přesnější je předběžné určení délky trasy, tím lépe je možné určit celkové parametry plánovaných tras (km, délku trvání, celkové náklady) a tím lépe je také samozřejmě možné tyto údaje optimalizovat.
Obr. 2: Optimalizované trasy, přehled vytíženosti vozidel
Metoda první - pevné (kmenové) trasy
Nejjednodušším (a v případě ručního plánování také nejčastěji používaným) modelem pro tvorbu distribučních tras je příprava pevných, tzv. kmenových tras, do kterých se rozmístí všichni odběratelé. V případě, že na určitý den má odběratel objednávku, bude tato objednávka do trasy automaticky zařazena. Tento přístup je tím účinnější, čím pravidelnější (z hlediska frekvence i velikosti) jsou objednávky pro všechny odběratele. V případě, že se struktura objednávek často mění, vede tento model k nevytíženým vozidlům, případně k dosti náročné dodatečné práci dispečera na finální úpravě tras. Řada plánovacích systémů nejde dále než k této variantě. Pevné trasy je možné jednu po druhé optimalizovat a dosáhnout tak určitých úspor na rozvoz. Úspory při použití tohoto typu plánovacího systému je možné očekávat zhruba v rozsahu 2-3 %.
Metoda druhá - volná optimalizace
Podstatou tzv.volné optimalizace je důraz na maximální úspory. V tomto případě plánovací systém hledá pro každý den optimální (z hlediska nákladů) distribuční trasy, které tedy mají každý den zcela jinou strukturu a zastávky. Z množiny vstupních objednávek se tedy pomocí příslušných algoritmů vytvoří množina distribučních tras - distribuční plán. Uživatel - plánovací dispečer - volí před spuštěním optimalizačního cyklu prioritu kritérií optimalizace, např. celkové náklady (nejčastěji používané), počet nasazených vozidel, počet tras, počet km apod. Vstupní data jsou propočtena integrovaným optimalizačním algoritmem. Volba algoritmu závisí na modelu přepravy spediční nebo distribuční společnosti. Pro firmy zabývající se kurýrními službami nebo převozem cenin je například často používán modifikovaný algoritmus pickup and delivery - který umožňuje plánovat vyzvednutí zakázky na jiném místě než v centrálním depu, u distribučních firem je nejčastěji využíván heuristický algoritmus (např. savings) - pro distribuci z jednoho nebo více centrálních dep. Algoritmy heuristického typu jsou velmi sofistikované a náročné na úspěšné vyladění - z toho plyne i poměrně malé množství programů, které volnou optimalizaci nabízejí. Metoda volné optimalizace přináší obvykle úspory v dopravních nákladech v rozmezí 10-20 %, samozřejmě v závislosti na počtu objednávek a složitosti struktury omezení (čím více objednávek a čím složitější omezení, tím je očekávaná úspora vyšší). Na druhé straně je nutné zvážit také fakt, že trasy jsou každý den zcela jiné, což klade zvýšené nároky na znalosti a orientaci řidičů.
Obr. 3.: Ukázky vektorových map v systému Plantour
Třešnička na dortu - sledování vozidel
Kvalitní plánování je základem organizace efektivního rozvozu, je však pouze začátkem komplexního procesu organizace dopravy. Pro nákladově optimální organizaci vozového parku, která je předpokladem pro rychlou návratnost investic vložených do dopravy, jsou důležité rovněž přesné a včasné informace, možnost vyhodnocení skutečných nákladů na rozvoz a příčin případných odchylek mezi nákladově optimálním plánem a skutečností. Je nutné si však uvědomit, že základem je tvorba optimálních distribučních tras - prvotní není totiž kontrola, ale řízení. Teprve to, jak se dodržují pravidla naplánovaná s výhledem na optimální dopravní náklady, je dobrý základ pro sledování a kontrolu. Mnoho firem zde chybně postupuje přesně naopak. Sledovací systém se skládá z mobilních jednotek a ze softwarového vybavení, které je instalováno na počítači dispečerského (klientského) pracoviště. Informace pro vytvoření skutečných tras získává sledovací systém z mobilní jednotky prostřednictvím rozhraní, které je pro různé systémy univerzální a nezávislé na typu jednotek. Při výjezdu vozidla z depa dostává sledovací systém informaci o startu trasy. Impulsem pro zahájení sledování je například zapnutí zapalování ve sledovaném vozidle. Mobilní jednotka zasílá pomocí GSM modulu do centrály sledovacího systému informace o vozidle na trase, kterými jsou poloha, čas a stav externích senzorů. Informace o vozidle je ve sledovacím systému možno vyhodnocovat v průběhu trasy, nebo po jejím skončení. Poloha vozidla na trase je zaznamenávána a předávána systému v pravidelných časových intervalech. Díky v současné době již poměrně vyzrálé technologii permanentního připojení k internetu, GPRS, je možné využít stálé připojení mobilní jednotky k centrále sledovacího systému. Výhodou datových služeb GPRS jsou nízké komunikační náklady spojené se sledováním vozidla, zejména pak ve srovnání s výhradní komunikací prostřednictvím SMS. Skutečná trasa přenesená do sledovacího systému může tak obsahovat nejen informace o přesném průběhu trasy, ale rovněž informace vztahující se k zastávkám u odběratelů na trase. Ve skutečné trase jsou jednotlivým bodům trasy přiřazeny informace o čase, najetých kilometrech a rychlosti.
Příklad integrovaného řešení optimalizace dopravy
Příkladem komplexního řešení pro plánování, optimalizaci dopravy a sledování vozidel včetně napojení na ERP může být integrovaný systém zahrnující programy Plantour (plánování a optimalizace dopravy), Carmanager (hodnocení, statistické přehledy, tiskové sestavy) a Trackmanager (sledovací systém). Toto řešení umožňuje plánování a sledování celého logistického řetězce od objednávky až po doručení zboží. Efektivnější plánování, sledování a řízení vozového parku se kladně odrazí v hospodaření zejména v oblasti redukce nákladů, např. díky snížení spotřeby PHM a opotřebení vozidla, snížení doby přepravy, úsporami nákladů na komunikaci aj. Významným přínosem řešení je rovněž možnost zkvalitnění služeb poskytovaných zákazníkům (informace o pohybu dodávky). Investice do plánovacích systémů spočívají především ve vybavení klientského pracoviště optimalizačním a sledovacím softwarem a vybavení vozidel mobilními jednotkami, přičemž plánovací a sledovací řešení jsou na sobě vzájemně nezávislá. Návratnost vložených prostředků do řešení pro plánování a/nebo sledování vozidel je závislá na objemech a četnosti přeprav. Při běžném provozu praxe prokázala návratnost od několika málo měsíců do jednoho roku.
Příkladem komplexního řešení pro plánování, optimalizaci dopravy a sledování vozidel včetně napojení na ERP může být integrovaný systém zahrnující programy Plantour (plánování a optimalizace dopravy), Carmanager (hodnocení, statistické přehledy, tiskové sestavy) a Trackmanager (sledovací systém). Toto řešení umožňuje plánování a sledování celého logistického řetězce od objednávky až po doručení zboží. Efektivnější plánování, sledování a řízení vozového parku se kladně odrazí v hospodaření zejména v oblasti redukce nákladů, např. díky snížení spotřeby PHM a opotřebení vozidla, snížení doby přepravy, úsporami nákladů na komunikaci aj. Významným přínosem řešení je rovněž možnost zkvalitnění služeb poskytovaných zákazníkům (informace o pohybu dodávky). Investice do plánovacích systémů spočívají především ve vybavení klientského pracoviště optimalizačním a sledovacím softwarem a vybavení vozidel mobilními jednotkami, přičemž plánovací a sledovací řešení jsou na sobě vzájemně nezávislá. Návratnost vložených prostředků do řešení pro plánování a/nebo sledování vozidel je závislá na objemech a četnosti přeprav. Při běžném provozu praxe prokázala návratnost od několika málo měsíců do jednoho roku.
Co by měl dobrý plánovací a optimalizační systém umět
Na základě předchozích odstavců je možné formulovat požadavky na funkcionalitu plánovacího systému. Bez ohledu na pořadí důležitosti, které se liší v závislosti na typu přepravy, se jedná o možnost výběru volné optimalizace i kmenových tras, přesné vektorové mapy s možností integrace odběrného místa každého zákazníka do těchto map, možnost uživatelsky jednoduché závěrečné ruční korekce naplánovaných tras optimalizačním algoritmem, interface na firemní ERP systém, přehledné zobrazení (ideálně i možnost úpravy např. pomocí funkce drag and drop) naplánovaných tras přímo v mapovém okně, vazba na univerzální sledovací systém s možností využít pro plánované i skutečné trasy zobrazení ve stejném mapovém okně, možnost nastavení co nejširší škály omezení pro trasy (jedná se např. o časová okna, omezení typu vozidel apod.). Vzhledem ke složitosti heuristických optimalizačních algoritmů je také nutné, aby měl daný systém přesvědčivé reference v podobě firem, které jej úspěšně používají.
Autor článku, RNDr. Zdeněk Moravec, působí jako chief software architect ve firmě Digitech ČR, která zajišťuje distribuci produktů firmy CorbitConnect AG v České republice, na Slovensku a v Polsku a spolupodílí se na vývoji plánovacích a optimalizačních řešení.
Chcete získat časopis IT Systems s tímto a mnoha dalšími články z oblasti informačních systémů a řízení podnikové informatiky? Objednejte si předplatné nebo konkrétní vydání časopisu IT Systems z našeho archivu.
Časopis IT Systems / Odborná příloha
Archiv časopisu IT Systems



 Oborové a tematické přílohy
Oborové a tematické přílohy



 Kalendář akcí
Kalendář akcí
Formulář pro přidání akce


IT Systems podporuje
| 6.10. | Unicorn Banking Forum 2016 |
Formulář pro přidání akce
Další vybrané akce