




- Přehledy IS
- APS (21)
- BPM - procesní řízení (23)
- Cloud computing (IaaS) (9)
- Cloud computing (SaaS) (29)
- CRM (49)
- DMS/ECM - správa dokumentů (19)
- EAM (16)
- Ekonomické systémy (68)
- ERP (87)
- HRM (27)
- ITSM (6)
- MES (32)
- Řízení výroby (47)
- WMS (28)
- Dodavatelé IT služeb a řešení
- Datová centra (25)
- Dodavatelé CAD/CAM/PLM/BIM... (40)
- Dodavatelé CRM (36)
- Dodavatelé DW-BI (50)
- Dodavatelé ERP (80)
- Informační bezpečnost (42)
- IT řešení pro logistiku (46)
- IT řešení pro stavebnictví (25)
- Řešení pro veřejný a státní sektor (26)
Tematické sekce
 ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tisk
ERP systémy CRM systémy Plánování a řízení výroby AI a Business Intelligence DMS/ECM - Správa dokumentů HRM/HCM - Řízení lidských zdrojů EAM/CMMS - Správa majetku a údržby Účetní a ekonomické systémy ITSM (ITIL) - Řízení IT Cloud a virtualizace IT IT Security Logistika, řízení skladů, WMS IT právo GIS - geografické informační systémy Projektové řízení Trendy ICT E-commerce B2B/B2C CAD/CAM/CAE/PLM/3D tiskBranžové sekce




Partneři webu

IT SYSTEMS 1-2/2019 , Plánování a řízení výroby , Logistika, řízení skladů, WMS



Navigace uvnitř hal
Location Based Services
Antonín Steinberger
 Mít přehled o tom, co je kde ve skladu a výrobě schované, je přinejmenším užitečné. Pro sledování objektů uvnitř budov slouží Location Based Services, které umožňují sledovat nejen polohu jednotlivých objektů, ale také jejich pohyb. To přináší nepřeberné množství možností sledování dat a výstupů a poskytuje podklady pro optimalizaci intralogistických procesů i samotného skladování. Ne vždycky ale potřebujete všechno vědět s naprostou přesností. Jaké technologické možnosti jsou na trhu k dispozici a na jakých principech fungují?
Mít přehled o tom, co je kde ve skladu a výrobě schované, je přinejmenším užitečné. Pro sledování objektů uvnitř budov slouží Location Based Services, které umožňují sledovat nejen polohu jednotlivých objektů, ale také jejich pohyb. To přináší nepřeberné množství možností sledování dat a výstupů a poskytuje podklady pro optimalizaci intralogistických procesů i samotného skladování. Ne vždycky ale potřebujete všechno vědět s naprostou přesností. Jaké technologické možnosti jsou na trhu k dispozici a na jakých principech fungují?
Technologie pro sledování objektů v reálném čase uvnitř budov byla poprvé představena na konci 90. let 20. století. Používanou technologií bylo RFID, pro komerční využití byl ale celý systém příliš drahý. I přesto šlo v té době o revoluční projekt. S rozvojem nových typů komunikačních technologií se řešení zlevnilo a zpřesnilo.
V současné době můžeme polohu v prostoru určovat několika způsoby. Od toho nejjednoduššího, zároveň ale méně přesného, kdy zjišťujeme pouze přítomnost sledovaného předmětu v okruhu přístupového bodu, po sofistikovanější způsoby, jako je například UWB (Ultra Wideband), kdy na principu triangulace a zachytávání signálů ve více bodech vypočteme polohu předmětu. Příkladem první metody může být WIFI AP, RFID brána nebo i scanner čárových kódů. UWB naopak nabízí zatím nejpřesnější určení polohy a také pohybu.
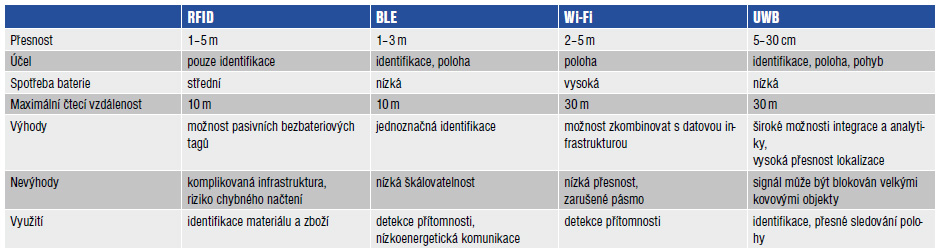
Technologie UWB umožňuje lokalizovat objekty s přesností až na 30 centimetrů a v současnosti je pro průmyslové využití vnímána jako ideální varianta v poměru cena/výkon. Ve světě lokalizace v reálném čase (RTLS) na tuto informaci narazíte poměrně často. Už o něco méně se mluví o tom, že není UWB jako UWB – pro určení polohy je možné použít tři rozdílné algoritmy, chcete-li, metody. Všechny ale pracují s časem, který vyslaný signál potřebuje k doletu k jinému zařízení.
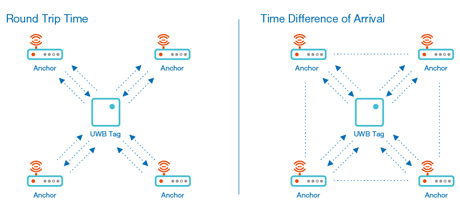
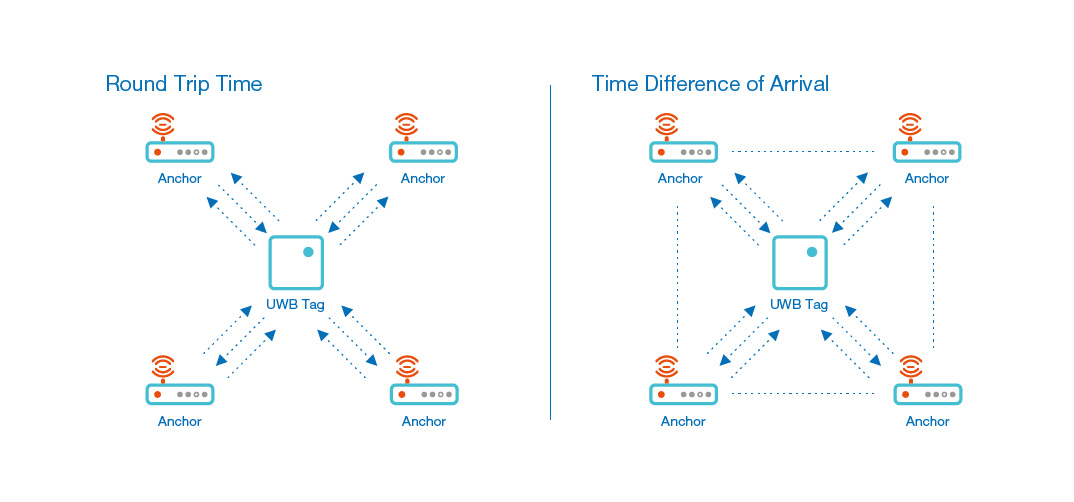
První metodou je Time of Arrival (ToA), nazývá se i Time of Flight (ToF), do češtiny můžeme výrazy přeložit jako doba letu. Přesná poloha se určuje podle času, který uběhl od vyslání signálu tagem po zachycení signálu kotvou. Obdobný princip je Round Trip Time (RTT), který měří čas na „cestě tam a zpátky“. Poslední možnou variantou je Time Difference of Arrival (TDoA), v češtině časový rozdíl doletu. Tato metoda je náročná na synchronizaci hodin v zařízeních, protože polohu určuje na základě rozdílného času v momentě vyslání signálu tagem a zachycení kotvou.
Vzhledem k tomu, že technologie UWB je poměrně krátce využívána (i když poprvé byla oficiálně využita již v roce 1901, kdy s ní Guglielmo Marconi poslal morseovku přes Atlantik), není její terminologie striktně daná. Kupříkladu někteří výrobci označují jako ToF i metody, které jsme v článku popsali jako RTT. Pro přehlednost se budeme zažitého značení držet. Jaké jsou tedy zásadní rozdíly mezi TDoA a ToF?
TDoA je náročnější na hardware, protože kotvy musí být po celou dobu v totální synchronizaci. Proto je cena kotev oproti ToF o něco vyšší (nízké desítky procent). Hlavní výzvou je šíření synchronizačního signálu mezi kotvami. Ten nemůže být rychlejší, než je rychlost světla. Souvisejícím rozdílem jsou vyšší náklady na instalaci provedení oproti ToF, protože synchronizace a kalibrace je u TDoA náročnější.
Vzhledem k tomu, že metoda ToF sleduje signál po trase tam i zpátky (a to ještě musí tag informaci poslat kotvě = třetí cesta), je možné s ní lokalizovat nižší počet tagů. V případě, že zvažujete řešení rozšiřovat počet sledovaných objektů, je TDoA jistější volbou. Z výše uvedeného vyplývá i fakt, že životnost baterie v tagu je vyšší u TDoA.
Abychom neodradili ty, kdo hledají řešení bez kompromisů (což se může jevit v reálných podmínkách jako téměř nemožné), máme na závěr dobrou zprávu. V současné době již probíhá testování metody, která spojí výhody TDoA i ToF. Na jejich výsledky a podrobnější informaci si ale ještě budeme muset počkat.
 |
Antonín Steinberger Autor článku je Presale Technical Consultant společnosti Aimtec. |
Chcete získat časopis IT Systems s tímto a mnoha dalšími články z oblasti informačních systémů a řízení podnikové informatiky? Objednejte si předplatné nebo konkrétní vydání časopisu IT Systems z našeho archivu.












| Po | Út | St | Čt | Pá | So | Ne |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | 1 | 2 | 3 | 4 | 5 |
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
IT Systems podporuje
Formulář pro přidání akce
Další vybrané akce